

汽车驾驶过程中,倒车与低速行驶时的视野盲区是安全风险的主要来源之一。360°汽车倒车全景影像系统通过多摄像头协同与图像处理技术,将车辆周围环境实时拼接成全景画面,帮助驾驶员直观掌握车身周边情况。这类系统常见于乘用车、商用车及工程车辆,尤其适用于狭窄道路通行、泊车或复杂场景作业。
一、技术组成与核心原理:
系统主要由四路高清摄像头、集成算法的显示屏及供电模块构成。摄像头通常安装于车辆前、后、左、右四个方向,单摄像头支持1080P分辨率(25/30帧/秒),可覆盖车身周围3米范围内的障碍物。显示屏采用10.1寸液晶屏,分辨率达1024×600,对比度600:1,亮度600cd/m²,即使在强光环境下也能清晰显示画面。其核心的360AVM算法通过实时采集四路摄像头图像,进行畸变校正、视角转换与画面拼接,最终生成3D或2D视角的全景影像,驾驶员可自由切换视角模式。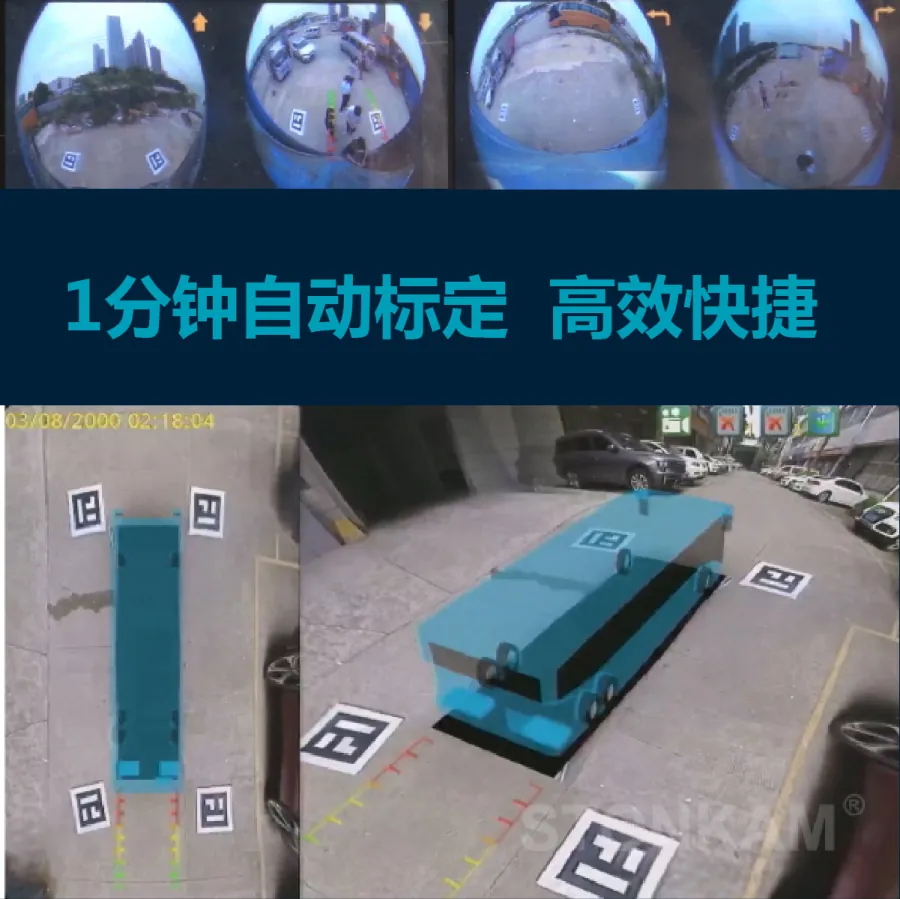
二、使用方式与操作逻辑:
系统无需额外控制盒,显示屏直接集成算法模块,通过DC10-32V宽电压供电,适配12V/24V车辆电气系统。启动车辆后,系统自动进入工作状态,倒车时优先显示后方画面并叠加辅助线,低速行驶时可手动切换至全景模式。扬声器输出1W/8Ω音频,可在倒车时提供提示音。系统支持-20℃至70℃工作环境温度,存储温度范围达-30℃至80℃,适应高湿度(RH90%)环境,确保在极端气候下稳定运行。
三、技术亮点与实际表现:
与传统单摄像头倒车影像相比,该系统的优势在于多视角覆盖与图像融合能力。四路摄像头输入可同时处理4路1080P信号,或兼容4路720P信号,避免因分辨率不足导致的细节丢失。3D视角模式下,画面具有空间层次感,驾驶员可直观判断障碍物与车身的相对位置;2D模式则提供俯视视角,适合观察整体布局。此外,系统功率仅25W,低功耗设计减少了对车辆电瓶的负担,长期使用更节能。


全部评论 (0)