

在辅助驾驶快速演进的几年里,行业讨论最多的,往往是算力和算法之争。但在我们看来,所有技术选择的前提,始终只有一个,即安全是否真的被放在了第一位。
当越来越多方案试图用“更少的硬件”换取“看起来足够聪明的系统”时,理想选择了另一条看似有点“笨”的路径:通过更可靠的感知冗余,把风险前移,把不确定性尽可能挡在系统之外。正因如此,激光雷达被纳入主动安全体系,成为车辆在高风险场景下的重要基础。
也正是在这样的判断下,理想自研了一整套主动安全体系。从更早发现风险,到更稳定地触发制动与避让,在极端情况下真正兜住安全底线。
01
坚定选择激光雷达路线,我们做到了行业领先。
去年5月,在携手央视新闻打造的《“新”动中国——有理想就出发》特别直播中,李想在直播中谈放宽预算审批的标准时表示:预算审批有一个例外,因为理想汽车的用户价值主张是更安全、更舒适、更便捷,安全总是排在第一位。任何跟安全相关的费用,都不需要他本人亲自审批,直接通过。
这一原则,并不只停留在制度层面,也直接影响着理想在具体技术方案上的选择。除了“安全预算无上限”,在这场直播中,另一个值得关注的关键词也逐渐浮出水面——激光雷达。
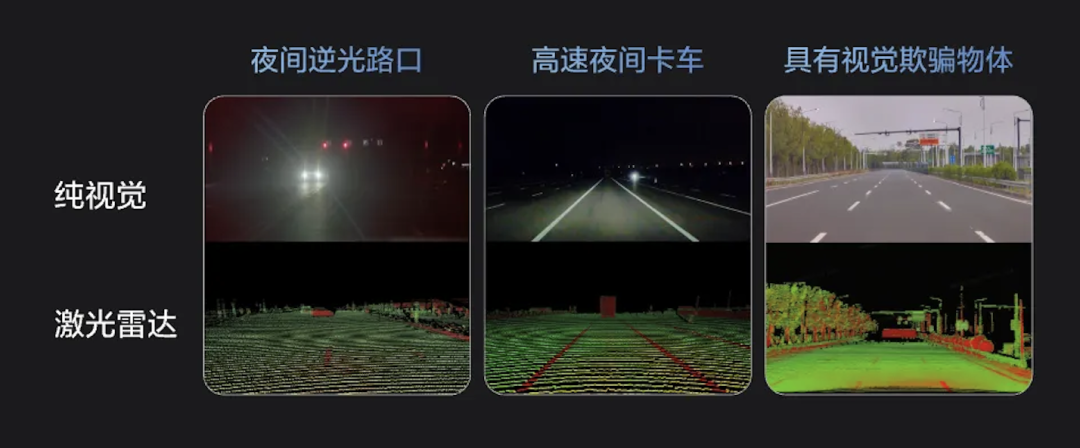
相信不少人都有同样的疑惑:别人都在走纯视觉路线,为什么理想汽车坚定地选择激光雷达路线?
在车辆安全领域,再谨慎也不为过。激光雷达能够解决人类驾驶解决不了的问题,在0.1秒内瞬间判断出避障最优方案——甚至比人类眨眼的速度还快。正如李想本人在直播中所介绍,在同样的视觉技术背景下,如果有激光雷达的加持,至少可以比纯视觉方案多避免20-30%的常规事故,而重大的伤亡事故,则能够做到90%以上的避免或者缓解。
正是基于这样的安全价值判断,理想在技术路线的选择上,给出了与行业不同的答案。在多数人眼中,激光雷达的价值是为了提升辅助驾驶能力,但我们将激光雷达作为现阶段不可或缺的安全配置。作为行业首个将激光雷达用于主动安全的企业,从今年起,理想选择全系标配激光雷达,让AD Pro平台的安全性与AD Max平台拉齐。
得益于激光雷达的远距离探测能力、超强环境适应能力等优势,主动安全能在夜间、雨雾、尘埃等环境下发挥出更强的保护作用。
但在我们看来,技术能力只是基础。更重要的是:先解决哪些风险,先守住哪些场景。
基于真实用户反馈与事故数据,我们建立了一套系统化的用户场景库:以“危害程度”与“发生频次”为双维度,将风险场景划分为9个区域,并在落地时遵循“先高危高频、再中危中频、后低危低频”的推进路径;同时持续回收真实数据,不断迭代主动安全场景的定义与应对策略。
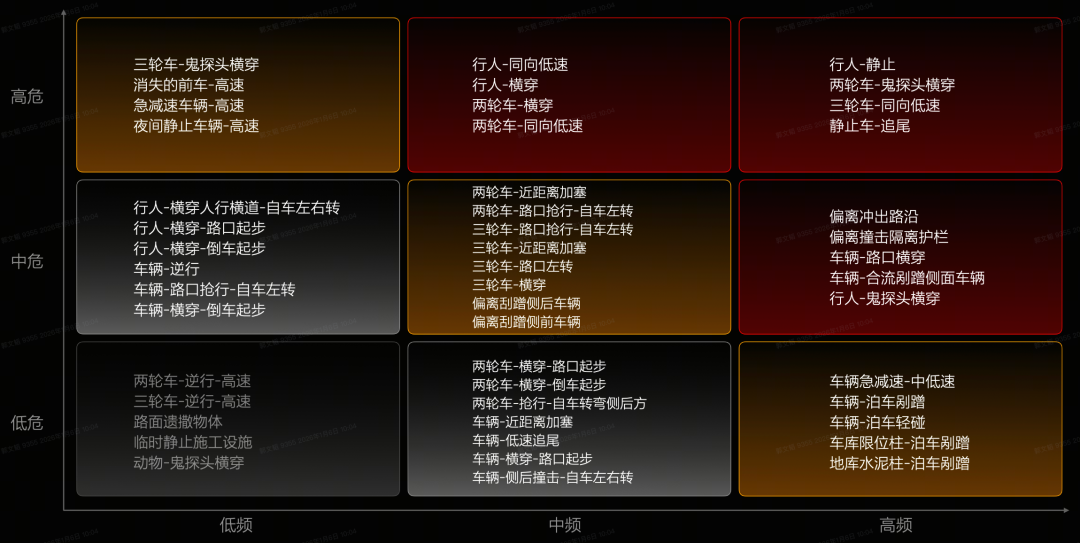
高频高危驾驶风险场景库
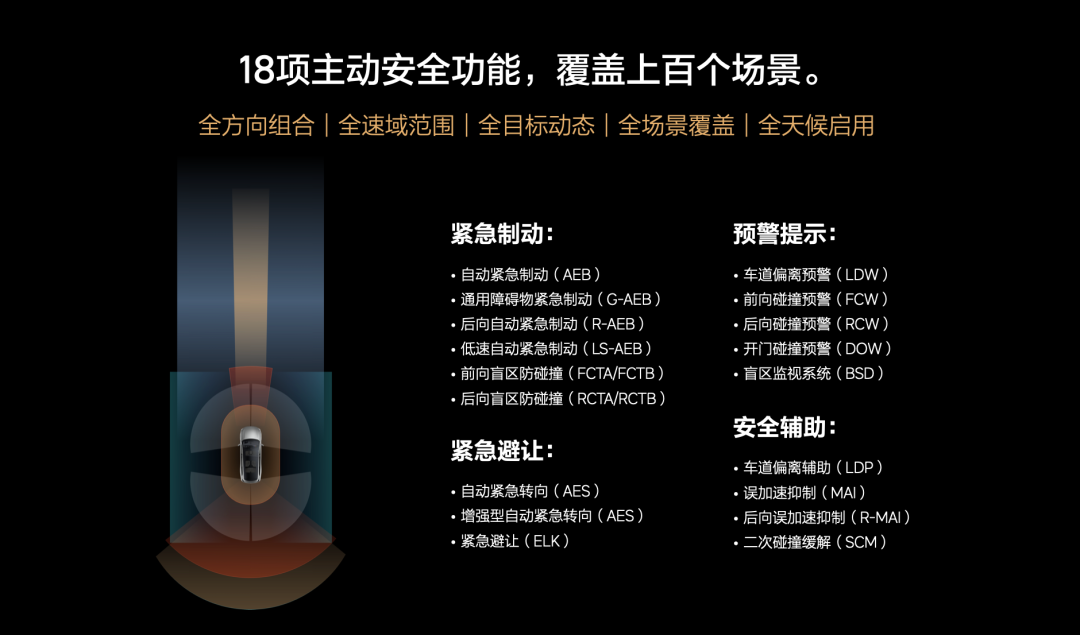
秉持用户价值优先的理念,在摄像头加激光雷达的主动安全技术路线下,我们坚持自研,打造了最全能的主动安全——
全方向:前向、侧向、后向
全速域:低速到高速
全目标:静止、纵向、横穿、逆行
全场景:“高频高危”到“低频低危”
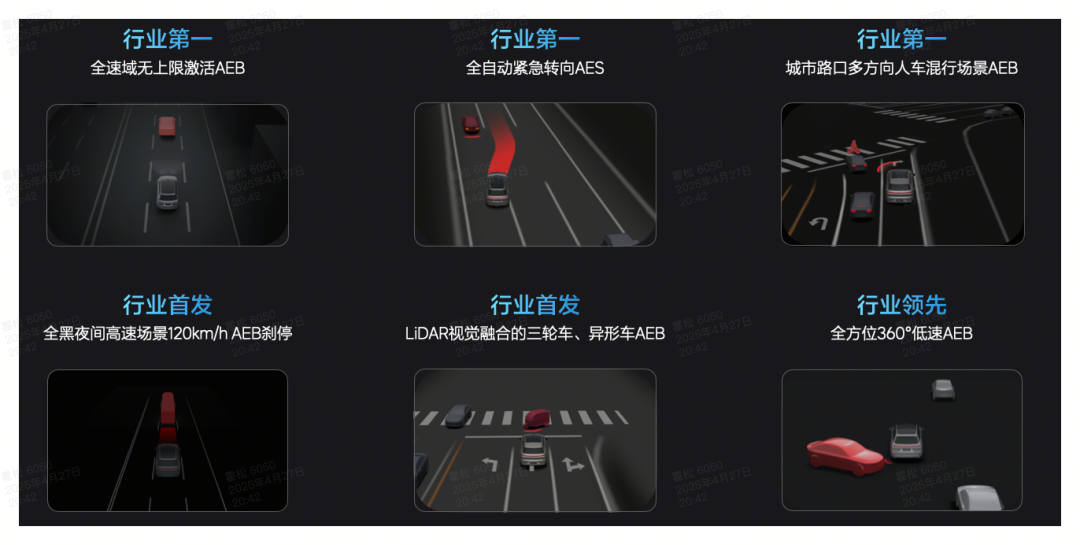
也实现了这些行业领先——
首个把AEB激活速度拓宽到全速域
首个为用户带来了全自动不用掰方向盘的AES
首个在城市路口的多方向人车混行场景提供AEB安全
行业首发高速上全黑夜无路灯120公里每小时AEB刹停
行业首发雷达视觉融合的三轮车、异形车AEB
接下来,让我们针对几项最关键的主动安全技术,展开讲讲。
02
AEB自动紧急制动:360度AEB安全盾,全方位守护。
AEB(自动紧急制动系统)是一项重要的汽车主动安全技术。它通过毫米波雷达、摄像头、激光雷达等传感器监测车辆前方道路情况。当系统判断可能与前方车辆、行人等发生碰撞风险时,会先向驾驶员发出警报;若驾驶员未及时反应,系统将自动进行制动,以避免碰撞或减轻其造成的伤害。
「MAI误加速抑制」
该功能依托自动驾驶级感知算法,融合车辆状态、路况信息与操作行为多维分析,精准识别驾驶意图,毫秒级区分正常加速与危险误触,搭配毫秒级控制响应,误踩瞬间即刻介入切断动力。
此外,还支持前向、后向全方向防护,行人、车辆、两轮车等目标均能精准触发;覆盖城市拥堵跟车、小区低速挪车等全场景,全天候待命。
由此,帮助大家告别“油门当刹车”的惊魂瞬间,误踩即抑制,危险快刹车。给新手从容驾驶底气,给老手多一重安全保障。
「全方位低速AEB」
在日常用车中,真正高频发生的并不是高速事故,而是低速环境下的各种剐蹭。尤其在地库停车等复杂场景中,柱子、墩子这些“看不见的危险”随时可能出现。理想的360度低速AEB做到无死角覆盖,在这些场景下也能及时刹停,把剐蹭挡在发生之前。
「中国特色场景AEB」
在城市路口,二轮、三轮快递车辆的突然横穿,是碰撞与剐蹭最为典型、也最为高频的风险场景之一。然而,这类场景往往未被纳入行业评测体系,或仅以较低标准进行测试。基于用户真实出行场景,我们在功能开发中提出了远高于行业测试要求的性能指标,在目标类型和运动方向上,构建了覆盖最全面的城市路口AEB安全能力。

「极限工况的AEB」
在真实道路环境中,主动安全面临的并不是单一目标或标准工况,而是多目标叠加、时序高度不确定的复杂场景。风险决策能力的核心,在于系统能否在极短时间内完成复杂场景的关键目标风险判定,并在不确定性中做出更稳妥的选择。
围绕这一能力,理想的主动安全体系持续朝着三个方向演进:更快、更多、更强。
应急响应能力-更快:简化功能响应链路,系统响应时间缩短50%,由原来的400-500ms缩减到200ms。在高速行驶或近距离突发情况下,这一时间差或许就是保障乘员安全的关键。
风险评估范围-更多:由枚举方位风险判断,演进为向“上帝视角”全方位风险判断。系统不再只关注单一目标,而是对周围多个目标的运动状态、相互关系和潜在路径进行综合评估。
撞击概率判断-更强:在风险预测层面,判断方式也从基于规则和手写代码的碰撞推断,演进为由模型进行概率化预判。系统不仅判断“是否可能发生碰撞”,还会评估不同时间、不同选择下的撞击风险变化,从而为制动、减速或转向等决策提供依据。
03
ELK紧急车道保持:洞察风险于毫秒,主动纠偏于车道。
ELK(紧急车道保持辅助)通过实时监测车辆、车道线、路沿以及盲区障碍物,在因车辆无意偏离车道而存在碰撞风险时,主动介入操控,将车辆保持在当前车道内,从而降低因驾驶员未察觉车道偏离而引发碰撞的可能性。
紧急车道保持功能开启后,自车变道或车辆偏离车道存在下述碰撞风险时,系统施加转向控制修正行驶方向,帮助驾驶员减轻或规避碰撞风险。
与侧后方相邻车道的超车车辆存在碰撞风险
与侧后方间隔车道的车辆抢道超车存在碰撞风险
与对向来车存在碰撞风险
与侧前方低速车辆存在追尾碰撞风险
与侧前方低速运动行人存在碰撞风险
ELK预判车辆碰撞风险
除了对路上的车辆与行人进行风险评估外,ELK也对固定路沿(路沿石、高速防护网等)和临时路沿(成排水马、锥桶等)的碰撞风险进行预判。
ELK预判路沿碰撞风险
04
AES自动紧急转向:增强型AES上车,实现主动安全行业天花板。
AES(自动紧急转向系统)是一项在AEB自动紧急制动基础上发展的主动安全技术。当系统判断单靠制动无法避免碰撞时,会在探测到相邻车道安全的前提下,控制车辆进行转向避让,从而提供“制动+转向”的双重安全防护。
2024年7月,理想汽车行业首发AES自动紧急转向功能,紧急避险从刹停升级到“边减速边转向”的横向躲避,这是真正意义上的全自动紧急转向:无需人为打方向盘辅助,在极限场景下极速响应,自动完成避让,不错过最佳避险时机,这也是极高速无法刹停场景下的唯一解决方案。
除了以上用户真实案例,理想的AES还能实现侧方盲区辅助,支持对路沿、护栏、行人、非机动车、车辆、通用障碍物等的告警及避让。
强大的产品实力背后,是理想辅助驾驶主动安全团队的自研结果,我们将BEV感知架构与激光雷达深度融合,加强远距离感知精准度,激光、毫米波、摄像头多源传感器融合,无惧恶劣天气及暗光环境。未来,这项功能还将覆盖极限的近距离加塞场景、鬼探头的两轮车、通用障碍物等更多极限用车场景。
在此前的理想AI Talk里,李想也回答了研发AES自动紧急转向这一功能的初心:“我们研发AES是在想,哪怕已经超速、刹车都刹不住,该怎么去躲避。AES的两段式避让就可以发挥作用——第一次躲避后,如果仍然遇到问题,怎么做第二次的躲避。这些,都是为了让车辆变得足够的安全,我们想办法消除掉90%以上,甚至最终目标是消除所有重大伤亡事故。”
这是我们对于打造“顶级安全”的决心——为用户的出行,再加一个安全带。
进入小程序,在线看车。




全部评论 (0)